휴머노이드 로봇용 정밀 부품 – 액추에이터용 기어 가공

장점
- 한 번의 클램핑 작업으로 완벽한 가공: 선삭, 밀링 및 연마를 한 번의 공정이로 수행. 클램핑 에러가 발생하지 않으며, ≤ 3 µm의 위치 공차를 공정 안정적으로 준수합니다.
- 특수 클램핑 및 장비 컨셉: 최대 3~5 µm의 런아웃을 가진 유압식 확장 클램핑 마운트가 가공 중 플렉스스플라인과 같은 얇은 벽면 부재의 탄성 변형을 방지합니다.
- 단일 공급처의 통합 공정 체인: 소프트 머시닝부터 하드 머시닝 까지 – EMAG는 세 가지 액추에이터 부품 모두에 대해 상호 조화된 기계 플랫폼을 통해 전체 제조 공정 체인을 포괄합니다.
- 공정 조합을 통한 사이클 타임 단축: 웨이브 제너레이터에서 타원형 윤곽의 예비 밀링과 정밀 연삭을 결합함으로써, 순수 연삭 가공에 비해 가공 시간을 30~40% 단축합니다.
- 설계 및 개발과 양산에 유연하게 대응: G 375 H와 같은 기계 플랫폼은 짧은 세팅 시간과 가변형 연마 휠을 통해 개발 단계의 소량 생산은 물론 안정적인 대량 양산까지 가능하게 합니다.
자주 묻는 질문
- 휴머노이드 로봇에서 웨이브 기어와 유성 기어는 액추에이터로서 어떻게 작동합니까?
- 플렉스스플라인은 기계 및 공정에 대해 어떤 특별한 제조 요구 사항을 가지고 있습니까?
- 로봇 액추에이터 부품 제조에 적합한 EMAG 기술 및 공정은 무엇입니까?
- 플렉스스플라인 제조를 위한 일반적인 공정 흐름은 어떻게 되나요?
- 로봇 부품 가공에 적합한 EMAG 기계는 무엇입니까?
- 로봇 부품의 기어 가공 시 어떤 공차 및 품질 등급을 달성할 수 있습니까?
- 이 부품들은 로봇 공학의 어떤 분야에서 사용됩니까?
- 로봇 치형 가공 시스템의 양산 과정에서 경제성을 어떻게 향상시킬 수 있습니까?
달성 가능한 품질 등급은 부품 및 공정에 따라 다르지만, 항상 최고 수준의 정밀도 범위에 속합니다.
플렉스스플라인의 경우, EMAG는 DIN 3960/62 또는 ISO 1328 4등급에 부합하는 톱니 가공 품질을 입증적으로 달성하며, 피치 공차는 단위 마이크로미터 범위이고 진동도는 5 µm 미만입니다. 웨이브 제너레이터는 한 번의 클램핑 작업으로 완벽한 가공 덕분에 ≤ 3 µm의 동심도 및 대칭도 공차를 달성합니다. 유성 기어는 공정에 따라 DIN 등급 4~6으로 제작되며, 휴머노이드 로봇 공학 분야의 새로운 요구 사항으로 인해 경화 전 등급 4에 대한 수요가 점차 증가하고 있습니다.
주요 적용 분야는 휴머노이드 로봇의 회전 액추에이터입니다.
현재의 휴머노이드 로봇에는 어깨, 팔꿈치, 엉덩이, 무릎 관절에 분산된 최소 14개의 회전 액추에이터가 필요합니다. 플렉스 스플라인(Flexspline) 및 웨이브 제너레이터(Wave Generator)가 장착된 웰 기어는 백래시 없음, 소형화 및 높은 감속비가 결정적인 요소인 곳에 주로 사용됩니다. 행성 기어박스는 높은 토오크가 필요한 관절을 담당합니다. 정밀 모터가 장착된 로봇 손의 설계 및 개발이 증가함에 따라 소형 기어박스에 대한 수요도 증가하고 있으며, 이는 EMAG 제조 솔루션의 성장하는 응용 분야입니다.
핵심은 짧은 사이클 타임, 낮은 불량률, 그리고 최소화된 세팅 작업입니다.
Wave Generator를 사용하여 타원형 윤곽을 예비 밀링 및 정밀 연삭하는 방식을 결합하면, 순수 연삭 가공에 비해 가공 시간을 30~40% 단축할 수 있습니다. 한 번의 클램핑 작업으로 완벽한 가공을 수행함으로써 리드 타임을 단축하고, 불량 원인의 하나인 클램핑 에러를 제거할 수 있습니다. 유성 기어의 경우, "블랭크 연마"라는 대체 공정을 통해 예비 톱니 가공 단계를 생략함으로써 공정 체인을 단축합니다. 또한 G 375 H는 짧은 세팅 시간 덕분에 부품 형상이 자주 바뀌는 경우에도 경제적인 운영이 가능합니다.
공작물
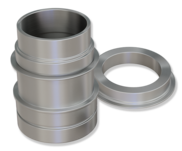
Flexspline
플렉스스플라인(Flexsplines)은 플렉시블 샤프트 휠, 플렉스 포토 또는 칼라 슬리브라고도 불리며, 헬리컬 기어의 핵심 부품입니다. 이 고정밀 부품은 단일 기어 단에서 매우 높은 감속비를 가능하게 합니다. 이는 유사한 감속비를 얻기 위해 여러 단과 그에 따라 훨씬 더 많은 설치 공간이 필요한 기존의 유성 기어에 비해 결정적인 이점입니다.

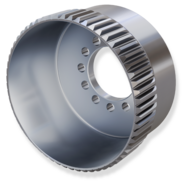
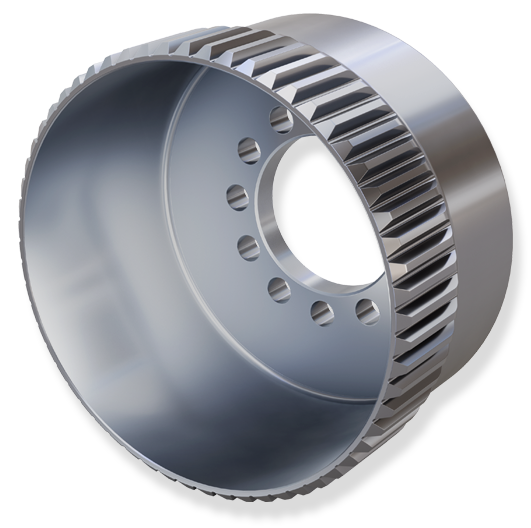
유성 기어
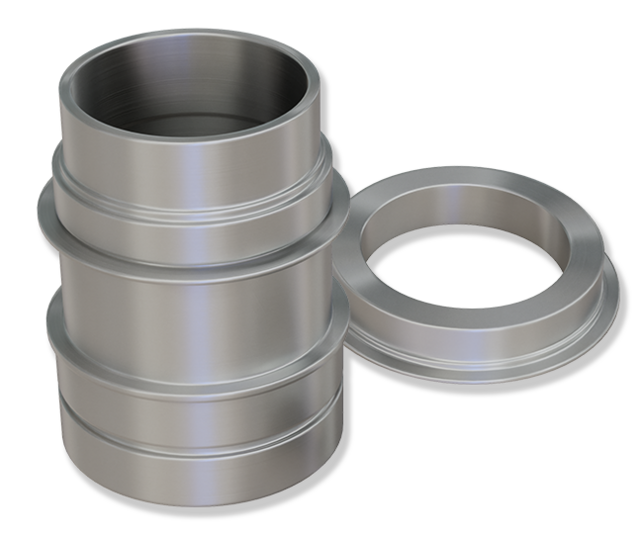
웨이브 제너레이터
웨이브 제너레이터는 하모닉 드라이브 기어박스의 부품입니다. 얇은 벽의 베어링 구조(외부 링 탄성, 타원형 캠에 고정된 내부 링)로 구성되며 타원형 윤곽으로 플렉스 휠의 형태 맞춤 변형을 정의합니다. 따라서 µm 범위의 형상 및 위치 공차가 필요하며, 일반적인 도면에는 무엇보다도 기준 보어 또는 기준 외경에 대한 타원 곡선의 동심도/대칭성 및 3µm 이하의…