{kind=link}
Strain wave gearboxes are an indispensable part of precision drive systems. They play a central role in robotics, automation technology, and positioning axes with high accuracy requirements in particular. But what exactly is the operating principle behind this gear technology, and why is it particularly suitable for compact, low-backlash drive solutions?
1. How does the strain wave gearwork?
Strain wave gearboxes differ fundamentally from classic gearboxes in that their mode of operation is not based on rigidly intermeshing gears. Instead, this type of gearbox makes targeted use of the elastic deformation of a thin-walled gear to achieve a high reduction ratio, a compact design, and low-backlash power transmission.
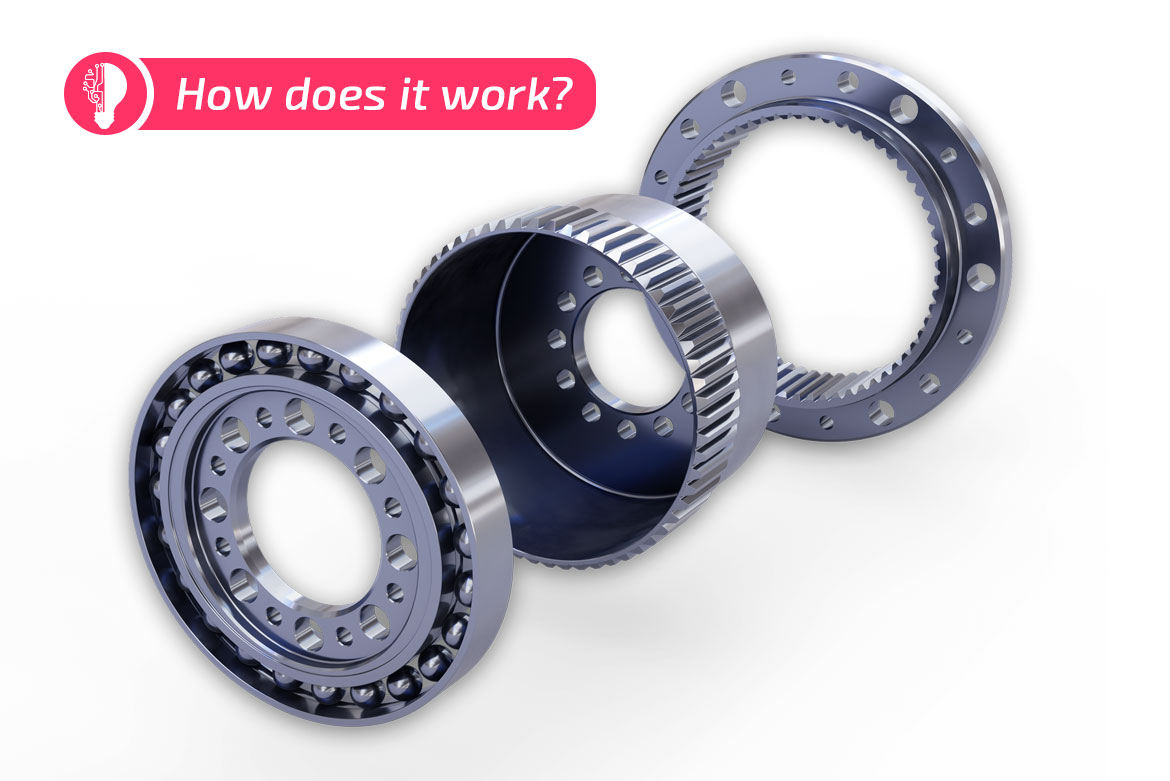
A strain wave gear consists essentially of three functionally coordinated components: the wave generator, the flexspline, and the circular spline. The wave generator is usually connected to the drive shaft and consists of an elliptical cam that deforms the flexspline via a thin-walled bearing. The flexspline is a cylindrical, elastic gear with slightly fewer teeth than the surrounding rigid circular spline.
The rotation of the wave generator causes the flexspline to undergo continuous elliptical deformation. As a result of this deformation, the flexspline engages with opposite tooth profiles on the circular spline. The different number of teeth on the two gears is crucial here: with each revolution of the wave generator, the point of engagement shifts by a few teeth. This results in a slow relative movement of the flexspline relative to the circular spline and thus the desired reduction ratio.
The particular advantage of this principle is that high reduction ratios can be achieved in just one gear stage. At the same time, the elastic preload of the flexspline ensures low-backlash meshing. For the user, this means precision movements, compact sizes, and very good repeat accuracy, especially in applications with frequent direction changes and high control quality requirements.
Schematic representation of a strain wave gear with circular spline, flexspline, and elliptical wave generator.
Source: Jahobr, CC0, via Wikimedia Commons, https://upload.wikimedia.org/wikipedia/commons/2/21/HarmonicDriveAni.gif
3. What is the purpose of the technology?
The strain wave gear enables high-precision motion transmission in a very compact design. It is used wherever rotary motions not only have to be transmitted, but also precisely controlled and reproducibly positioned. A central purpose is low-backlash torque transmission. Due to the elastic deformation of the flexspline, several pairs of teeth engage simultaneously, which largely eliminates tooth flank backlash. This enables high repeat accuracy and stable control behavior, even with frequent changes in direction. At the same time, very high reduction ratios can be achieved in just one gear stage. The reduction ratio results from the small tooth difference between the flexspline and circular spline. The even load distribution over many teeth also allows high torques with comparatively small dimensions.
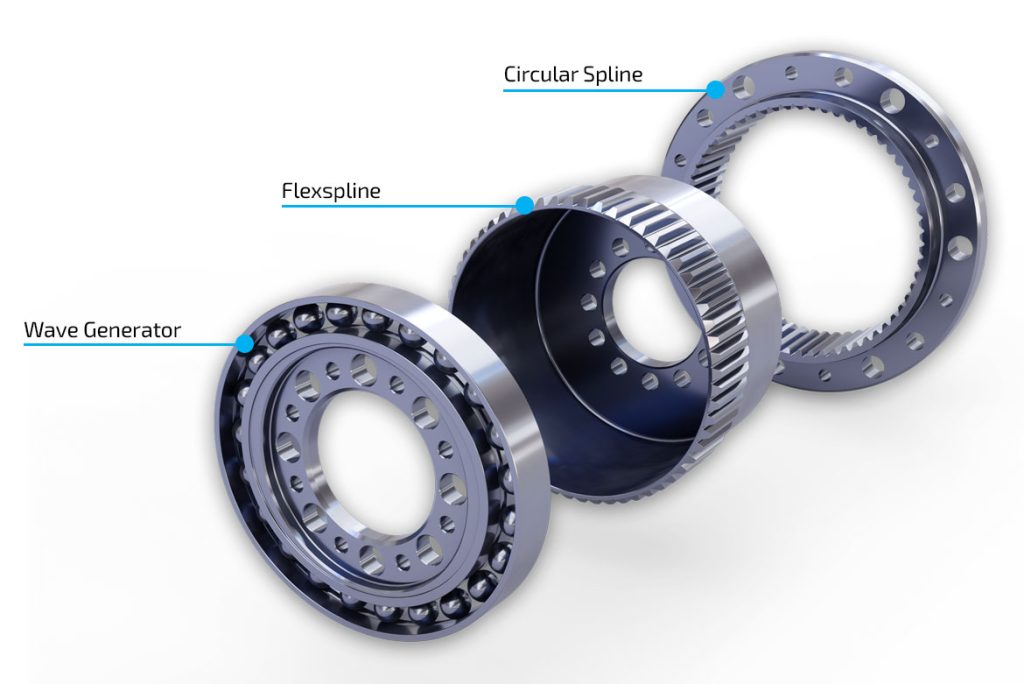
Exploded view of a strain wave gear with wave generator, flexspline, and circular spline.
3. Who invented it?
The functional principle of the strain wave gear was developed by American engineer Clarence Walton Musser. He first described the idea of elastic gearing in a patent application in 1957 (US Patent 2,906,143 – “Strain Wave Gearing”). Industrial use began in the 1960s, initially in the aerospace industry, where the compact design, low-backlash gears, and high accuracy offered decisive advantages. With the further development of materials, gear geometries, and manufacturing technologies, strain wave gearboxes found increasing application in industrial automation and robotics from the 1970s onwards.
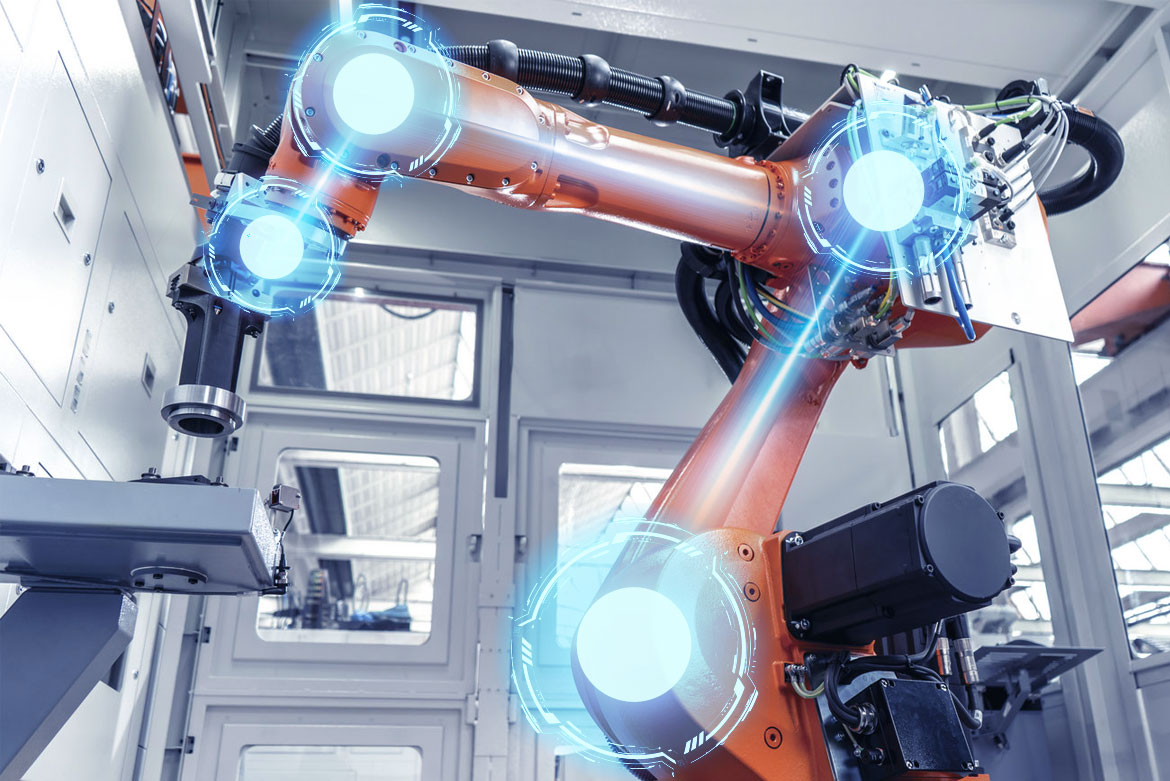
Industrial robots with marked joint axes in which strain wave gears are used. The illustration shows typical areas of application for compact gears in robotics.
4. What are the advantages and disadvantages of strain wave gearboxes?
The main advantage of the strain wave gear is its low-backlash torque transmission. The elastic gearing allows direction changes with minimal backlash (often <1 arcmin), resulting in high positioning and repeat accuracy. This makes the gear particularly suitable for precision, controlled drive systems. Another advantage is the high reduction ratio in just one gear stage. This enables very compact drive solutions with high torque density. Power transmission via many simultaneously load-bearing teeth also ensures smooth running and reduces local load peaks.
On the other hand, there is limited torsional stiffness resulting from the elastic deformation of the flexspline, which must be considered in dynamic applications. Efficiency is also lower than that of classic gear drives, as part of the power is required for cyclic deformation. Further limitations relate to shock and overload capacity as well as limited continuous speeds. Alternative gear concepts are therefore more suitable for highly dynamic or shock-loaded applications.

Depiction of a humanoid robot with highlighted joint positions on the arms, legs, and torso. The graphic shows typical installation locations for high-precision gearboxes for multi-axis movements.
5. What does the future hold?
Strain wave gears play a central role in humanoid robots. High positioning accuracy, a compact design, and low backlash are crucial, especially in the arm, hand, and leg axes, in order to replicate human movements with precision and repetition. Strain wave gears are particularly suitable for joints with high reduction ratios, where the motor, sensory equipment, and gearbox are closely integrated, and stable control behavior is required. Technical developments focus on extending the service life of the flexspline, increasing rigidity, and improving suitability for dynamic load changes, such as those that occur in humanoid motion sequences. This means that strain wave gear boxes remain a key technology for precision and compact joint drives in humanoid robot systems.