{kind=link}
Wellengetriebe sind aus präzisen Antriebssystemen kaum wegzudenken. Insbesondere in der Robotik, Automatisierungstechnik und bei Positionierachsen mit hohen Genauigkeitsanforderungen spielen sie eine zentrale Rolle. Doch was genau ist das Funktionsprinzip dieser Getriebetechnologie und warum eignet sie sich besonders für kompakte, spielfreie Antriebslösungen?
1. Wie funktioniert das Wellengetriebe?
Wellengetriebe unterscheiden sich grundlegend von klassischen Zahnradgetrieben, da ihre Wirkungsweise nicht auf starr ineinandergreifenden Zahnrädern beruht. Stattdessen nutzt diese Getriebeform die elastische Verformung eines dünnwandigen Zahnrads gezielt aus, um eine hohe Untersetzung, eine kompakte Bauweise und eine nahezu spielfreie Kraftübertragung zu erreichen.
Ein Wellengetriebe besteht im Kern aus drei funktional aufeinander abgestimmten Bauteilen: dem Wave Generator, dem Flexspline und dem Circular Spline. Der Wave Generator ist in der Regel mit der Antriebswelle verbunden und besteht aus einer elliptischen Nocke, die über ein dünnwandiges Lager den Flexspline verformt. Der Flexspline ist ein zylinderförmiges, elastisches Zahnrad mit geringfügig weniger Zähnen als der umliegende, starre Circular Spline.
Durch die Rotation des Wave Generators wird der Flexspline kontinuierlich elliptisch verformt. Durch diese Verformung greift der Flexspline in gegenüberliegenden Verzahnungen in den Circular Spline ein. Dabei ist die unterschiedliche Zähnezahl der beiden Zahnräder entscheidend: Bei jeder Umdrehung des Wave Generators verschiebt sich der Eingriffspunkt um wenige Zähne. Dadurch entsteht eine langsame Relativbewegung des Flexspline gegenüber dem Circular Spline und somit die gewünschte Untersetzung.
Der besondere Vorteil dieses Prinzips liegt darin, dass hohe Untersetzungen in nur einer Getriebestufe erreicht werden können. Gleichzeitig sorgt die elastische Vorspannung des Flexspline für eine nahezu spielfreie Verzahnung. Für den Anwender bedeutet dies präzise Bewegungen, kompakte Baugrößen und eine sehr gute Wiederholgenauigkeit, insbesondere bei Anwendungen mit häufigen Richtungswechseln und hohen Anforderungen an die Regelgüte.
Schematische Darstellung eines Wellengetriebes mit Circular Spline, Flexspline und elliptischem Wave Generator.
Quelle: Jahobr, CC0, via Wikimedia Commons, https://upload.wikimedia.org/wikipedia/commons/2/21/HarmonicDriveAni.gif
2. Welchen Zweck erfüllt die Technologie?
Das Wellengetriebe ermöglicht eine hochpräzise Bewegungsübertragung bei sehr kompakter Bauform. Es kommt überall dort zum Einsatz, wo Drehbewegungen nicht nur übertragen, sondern auch exakt geregelt und reproduzierbar positioniert werden müssen. Ein zentraler Zweck ist die nahezu spielfreie Drehmomentübertragung. Durch die elastische Verformung des Flexspline greifen mehrere Zahnpaare gleichzeitig ineinander, wodurch das Zahnflankenspiel weitgehend eliminiert wird. Dies ermöglicht eine hohe Wiederholgenauigkeit und ein stabiles Regelverhalten, auch bei häufigen Richtungswechseln. Gleichzeitig lassen sich sehr hohe Untersetzungen in nur einer Getriebestufe realisieren. Die Untersetzung ergibt sich aus der geringen Zahndifferenz zwischen Flexspline und Circular Spline. Die gleichmäßige Lastverteilung über viele Zähne erlaubt zudem hohe Drehmomente bei vergleichsweise kleinen Abmessungen.
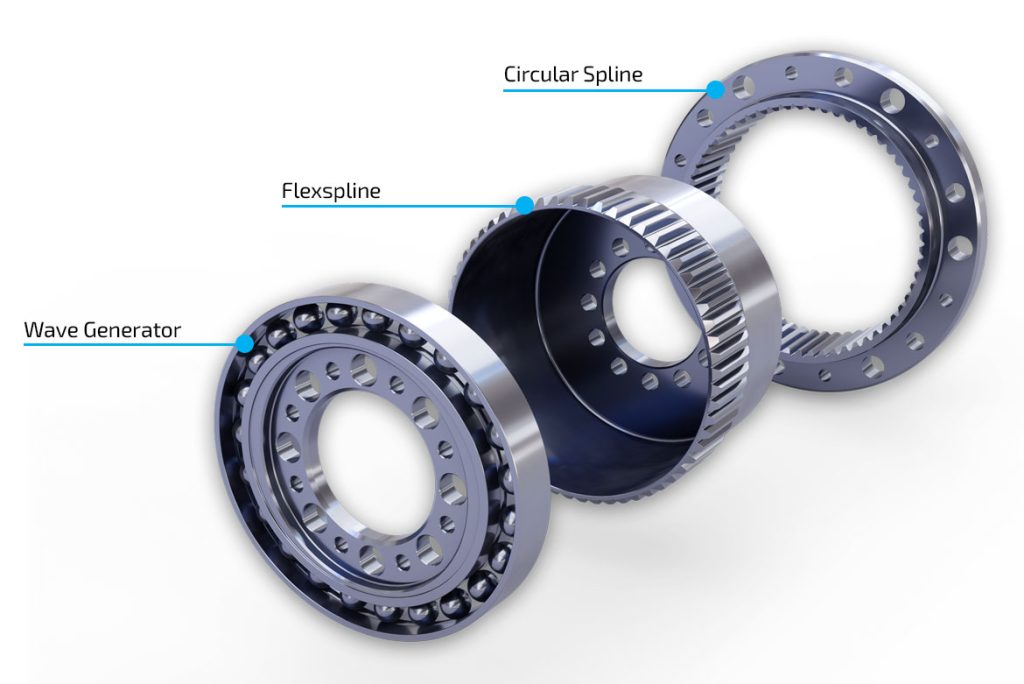
Explosionsdarstellung eines Wellengetriebes mit Wave Generator, Flexspline und Circular Spline
3. Wer hat’s erfunden?
Das Funktionsprinzip des Wellengetriebes geht auf den amerikanischen Ingenieur Clarence Walton Musser zurück. Er beschrieb die Idee der elastischen Verzahnung erstmals 1957 in einer Patentanmeldung (US-Patent 2,906,143 – „Strain Wave Gearing“). Die industrielle Nutzung begann in den 1960er-Jahren zunächst in der Luft- und Raumfahrt, da dort die kompakte Bauweise, die spielfreien Getriebe und die hohe Genauigkeit entscheidende Vorteile boten. Mit der Weiterentwicklung von Werkstoffen, Verzahnungsgeometrien und Fertigungstechnologien fand das Wellengetriebe ab den 1970er-Jahren auch zunehmend Anwendung in der industriellen Automatisierung und Robotik.
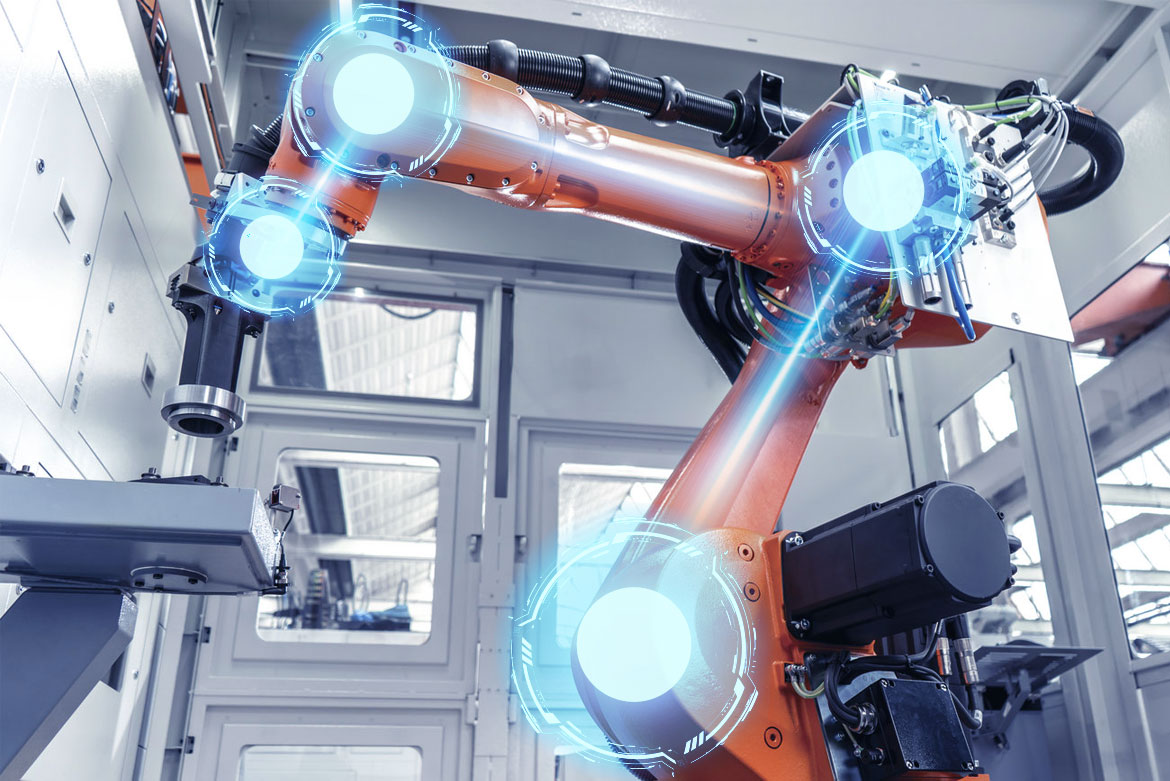
Industrieroboter mit markierten Gelenkachsen, in denen Wellengetriebe eingesetzt werden. Die Darstellung zeigt typische Einsatzbereiche für kompakte Getriebe in der Robotik.
4. Welche Vor- und Nachteile hat das Wellengetriebe?
Der zentrale Vorteil des Wellengetriebes ist die nahezu spielfreie Drehmomentübertragung. Durch die elastische Verzahnung erfolgen Richtungswechsel mit minimalem Umkehrspiel (oft <1 arcmin), wodurch sich eine hohe Positionier- und Wiederholgenauigkeit ergibt. Somit eignet sich das Getriebe besonders für präzise, geregelte Antriebssysteme. Ein weiterer Vorteil ist die hohe Untersetzung in nur einer Getriebestufe. Dadurch sind sehr kompakte Antriebslösungen bei gleichzeitig hoher Drehmomentdichte möglich. Die Kraftübertragung über viele gleichzeitig tragende Zähne sorgt zudem für einen ruhigen Lauf und reduziert lokale Belastungsspitzen.
Demgegenüber steht die begrenzte Torsionssteifigkeit, die aus der elastischen Verformung des Flexspline resultiert und bei dynamischen Anwendungen berücksichtigt werden muss. Auch der Wirkungsgrad liegt unter dem von klassischen Zahnradgetrieben, da ein Teil der Leistung für die zyklische Verformung benötigt wird. Weitere Einschränkungen betreffen die Stoß- und Überlastfähigkeit sowie die begrenzten Dauerdrehzahlen. Für hochdynamische oder stark stoßbelastete Anwendungen sind daher alternative Getriebekonzepte besser geeignet.

Darstellung eines humanoiden Roboters mit hervorgehobenen Gelenkpositionen an Armen, Beinen und Rumpf. Die Grafik zeigt typische Einbauorte hochpräziser Getriebe für mehrachsige Bewegungen.
5. Was bringt die Zukunft?
Wellengetriebe spielen eine zentrale Rolle in humanoiden Robotern. Insbesondere in den Arm-, Hand- und Beinachsen sind eine hohe Positioniergenauigkeit, eine kompakte Bauform und ein geringes Verdrehspiel entscheidend, um menschliche Bewegungen präzise und wiederholbar nachzubilden. Wellengetriebe eignen sich besonders für Gelenke mit hoher Untersetzung, bei denen Motor, Sensorik und Getriebe eng integriert sind und ein stabiles Regelverhalten erforderlich ist. Technische Weiterentwicklungen konzentrieren sich auf eine längere Lebensdauer des Flexspline, eine höhere Steifigkeit und eine bessere Eignung für dynamische Lastwechsel, wie sie bei humanoiden Bewegungsabläufen auftreten. Damit bleibt das Wellengetriebe eine Schlüsseltechnologie für präzise und kompakte Gelenkantriebe in humanoiden Robotersystemen.