{kind=link}
Los engranes helicoidales son indispensables en los sistemas de accionamiento de precisión. Desempeñan un papel fundamental, especialmente en robótica, tecnología de automatización y ejes de posicionamiento con altos requisitos de precisión. Pero ¿cuál es exactamente el principio de funcionamiento de esta tecnología de engranajes y por qué es especialmente adecuada para soluciones de accionamiento compactas y libres de juego?
1. ¿Cómo funciona la transmisión armónica?
Las transmisiones armónicas se diferencian fundamentalmente de los engranes clásicos, ya que su funcionamiento no depende de engranes rígidos que acoplan directamente entre sí. En su lugar, este tipo de transmisión utiliza la deformación elástica controlada de un engrane de pared delgada para lograr: una alta relación de reducción, un diseño sumamente compacto, y una transmisión casi libre de juego.
Una transmisión armónica se compone básicamente de tres componentes que trabajan de manera funcionalmente coordinada: el Wave Genarator, el Flexspline y el Circular spline . El generador de ondas suele estar conectado a la flecha de transmisión y está formado por una leva elíptica que, a través de un rodamiento de pared delgada, deforma el Flexspline.
El Flexspline es un engrane cilíndrico y elástico con un número de dientes ligeramente inferior al del Circular Spline, el cual es rígido y lo rodea externamente. Cuando el Wave Generator gira, el Flexspline se deforma continuamente en forma elíptica. Como resultado, el Flexspline engrana con el Circular spline en dos zonas opuestas.
La diferencia en el número de dientes entre ambos engranes es la clave: en cada vuelta del Wave Generator, el punto de engrane se desplaza unos cuantos dientes, lo que genera un movimiento relativo muy lento del Flexspline respecto al Circular Spline . Así se obtiene la reducción deseada.
La ventaja principal de este principio radica en que permite lograr altas relaciones de reducción en una sola etapa, mientras que la precarga elástica del Flexspline asegura un engrane prácticamente libre de juego. Para el usuario, esto se traduce en movimientos extremadamente precisos, tamaños compactos y una excelente repetibilidad, especialmente en aplicaciones con frecuentes cambios de dirección y altas exigencias de control y precisión.
Representación esquemática de una transmisión armónica con Circular Spline , Flexspline y Wave Generator elíptico.
Fuente: Jahobr, CC0, via Wikimedia Commons, https://upload.wikimedia.org/wikipedia/commons/2/21/HarmonicDriveAni.gif
2. ¿Qué finalidad cumple esta tecnología?
La transmisión armónica permite una transferencia de movimiento altamente precisa dentro de una construcción muy compacta. Se utiliza en aplicaciones donde las rotaciones no solo deben transmitirse, sino también regularse con exactitud y posicionarse de forma reproducible. Uno de sus propósitos centrales es lograr una transmisión de torque prácticamente libre de juego. Gracias a la deformación elástica del Flexspline, varios pares de dientes engranan simultáneamente, lo que prácticamente elimina el juego entre flancos. Esto permite una alta repetibilidad y un comportamiento de control estable, incluso en aplicaciones con frecuentes cambios de dirección. Al mismo tiempo, la tecnología permite obtener relaciones de reducción muy altas en una sola etapa. La relación de transmisión surge de la pequeña diferencia en el número de dientes entre el Flexspline y el Circular Spline. La distribución uniforme de la carga sobre muchos dientes permite además altos valores de torque en un reductor de dimensiones relativamente pequeñas.
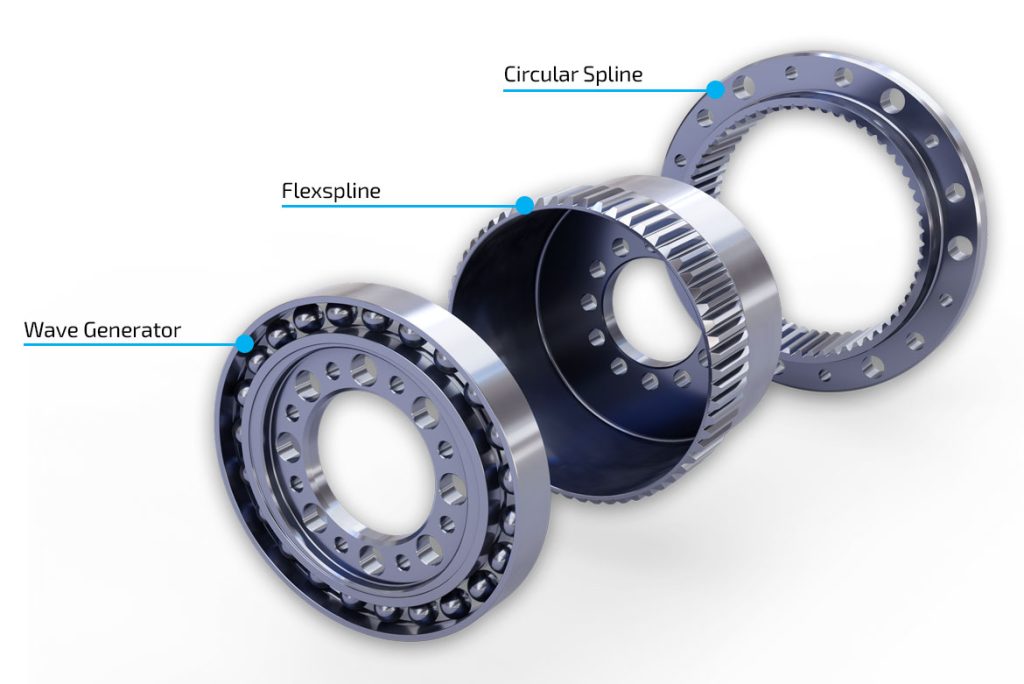
Despiece de una transmisión armónica con sus tres componentes principales: Wave Generator, Flexspline y Circular Spline .
3. ¿Quién la inventó?
El principio de funcionamiento de la transmisión armónica se remonta al ingeniero estadounidense Clarence Walton Musser. Musser describió por primera vez la idea del engranaje elástico en 1957 en una solicitud de patente (US Patent 2,906,143 – “Strain Wave Gearing”). El uso industrial comenzó en la década de 1960, inicialmente en la aeronáutica y astronáutica, donde la construcción compacta, la ausencia de juego y la alta precisión ofrecían ventajas decisivas. Con el avance en materiales, geometrías de engranes y tecnologías de fabricación, la transmisión armónica empezó a utilizarse cada vez más a partir de los años 1970 en la automatización industrial y la robótica.
Robots industriales con ejes articulados destacados, en los cuales se emplean transmisiones armónicas. La ilustración muestra las áreas de aplicación típicas para reductores compactos en la robótica.
4. ¿Qué ventajas y desventajas tiene la transmisión armónica?
El principal beneficio de la transmisión armónica es su transmisión de torque prácticamente libre de juego. Gracias al engrane elástico, los cambios de dirección se realizan con un juego de inversión mínimo (a menudo < 1 arcmin), lo que se traduce en alta precisión de posicionamiento y excelente repetibilidad. Esto hace que el reductor sea especialmente adecuado para sistemas de accionamiento precisos y controlados. Otra ventaja es que permite relaciones de reducción muy altas en una sola etapa, lo que posibilita soluciones de accionamiento muy compactas con una alta densidad de torque. La transmisión del esfuerzo a través de muchos dientes en contacto simultáneo garantiza un funcionamiento suave y reduce los picos de carga locales.
Por otro lado, existe una rigidez torsional limitada, que proviene de la deformación elástica del Flexspline y debe considerarse en aplicaciones altamente dinámicas. Además, el rendimiento es menor que el de engranajes tradicionales, ya que parte de la energía se utiliza para la deformación cíclica del Flexspline. Otras limitaciones incluyen: capacidad reducida para soportar impactos o sobrecargas, velocidades continuas de operación limitadas. Por ello, para aplicaciones muy dinámicas o sometidas a cargas de impacto elevadas, pueden ser más adecuados otros tipos de transmisiones.

Representación de un robot humanoide con posiciones articulares en brazos, piernas y torso. La ilustración muestra los lugares típicos de instalación de reductores de alta precisión para movimientos multieje.
5. ¿Qué depara el futuro?
Las transmisiones armónicas desempeñan un papel central en los robots humanoides. En particular, en los ejes de los brazos, manos y piernas, la alta precisión de posicionamiento, el diseño compacto y el mínimo juego torsional son requisitos clave para reproducir movimientos humanos de manera precisa y repetible. Las transmisiones armónicas son especialmente adecuadas para articulaciones con alta relación de reducción, donde el motor, los sensores y la transmisión están estrechamente integrados y se requiere un comportamiento de control altamente estable. Las mejoras tecnológicas actuales se enfocan en aumentar la vida útil del Flexspline, elevar la rigidez torsional, mejorar el rendimiento frente a cargas dinámicas y cambios bruscos de dirección, tal como ocurre en los movimientos característicos de robots humanoides. Con estas innovaciones, la transmisión armónica se mantiene como una tecnología clave para accionamientos articulares compactos, precisos y de alta repetibilidad en sistemas robóticos humanoides.