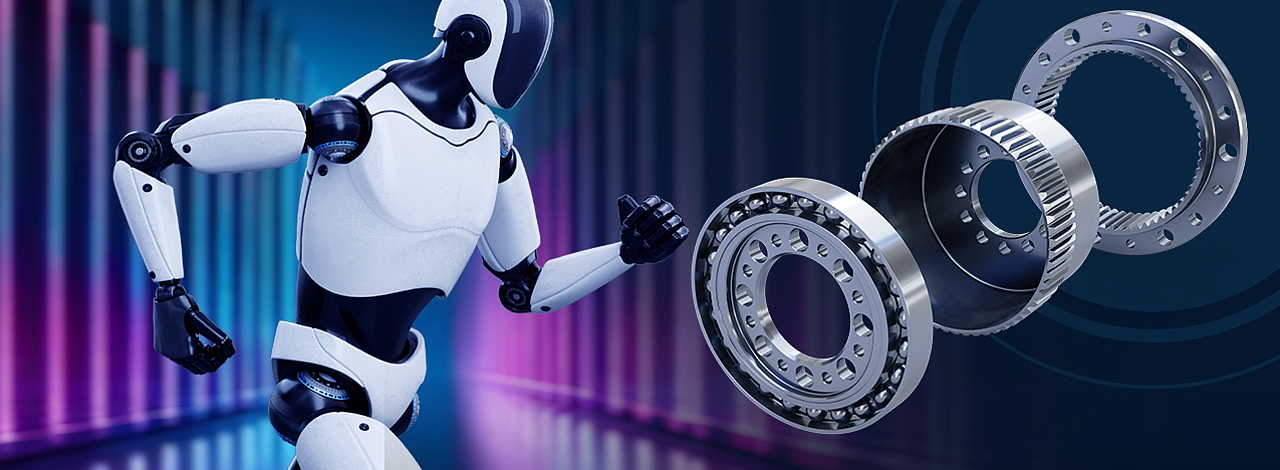
Fertigungslösungen für zentrale Getriebekomponenten von humanoiden Robotern
Die Antriebstechnik humanoider Roboter stellt eine besondere Herausforderung dar: In einem einzigen System kommen unterschiedliche Getriebekonzepte – Wellgetriebe (Harmonic Reducer), Planetengetriebe sowie Linearaktuatoren wie Planetenrollengewindetriebe – zusammen. Jede dieser Bauarten erfordert eigene Werkstücke, deren Präzisionsanforderungen sich erheblich voneinander unterscheiden.
Was sie verbindet: Form- und Lagetoleranzen im einstelligen Mikrometerbereich, dünnwandige oder filigrane Geometrien, komplexe Verzahnungen und elliptische Konturen – bei gleichzeitig steigenden Anforderungen an Serienfähigkeit und Wirtschaftlichkeit.
Genau hier setzt unser Webinar an. Sehen Sie sich die Aufzeichnung an und erfahren Sie mehr über die Herstellung der Werkstücke, die die Leistungsfähigkeit humanoider Roboter bestimmen:
- Circular Splines mit hochpräziser Innenverzahnung
- Flexsplines als dünnwandige, flexible Wellenräder
- Wave Generatoren mit elliptischen Funktionskonturen
- Planetenräder für kompakte, drehmomentstarke Getriebe
- Planetenrollengewindespindeln für lineare Aktuatoren
Sie erfahren, wie sich durchgängige Prozessketten für diese Bauteile aufbauen lassen – vom Weichdrehen über das Hartdrehen und Schleifen bis zur Verzahnungsbearbeitung. Wir zeigen anhand realer Werkstück-Beispiele, wie die Komplettbearbeitung in einer Linienproduktion Fehlerquellen aus dem Werkstückumlauf eliminiert und damit die geforderten Toleranzen prozesssicher erreichbar macht. Und wir erläutern, wie sich Taktzeiten durch die gezielte Kombination von Fertigungsverfahren – etwa Vorfräsen und Fertigschleifen – deutlich reduzieren lassen.
Videos & Downloads
Das könnte Sie auch interessieren ...


Registrierung Mediathek